
Meski canggih robot saat ini belum memiliki keterampilan sosial yang ada pada manusia sehingga terkesan kaku. Melalui pemrograman dari sistem pembelajaran mesin, dapat membantu robot memahami dan melakukan interaksi sosial tertentu.
Membekali Robot dengan Keterampilan Sosial
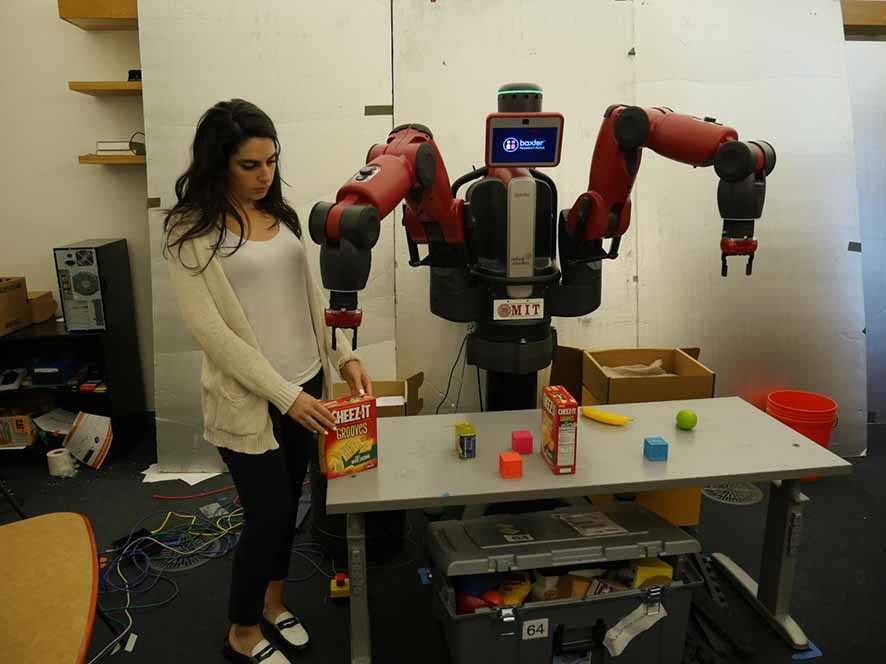
Foto : istimewa
Robot yang dibekali dengan kecerdasan buatan (artificial intelligence/AI) yang mampu berpikir saat ini memang canggih. Namun, robot tercanggih saat yang ada belum dibekali dengan keterampilan interaksi sosial dasar yang penting dalam berinteraksi dengan manusia sehari-hari.
Untuk memberi keterampilan sosial pada robot, para peneliti Computer Science and Artificial Intelligence Laboratory (CSAIL), Massachusetts Institute of Technology (MIT) tengah mengembangkan sebuah robot yang memiliki keterampilan sosial layaknya manusia. Melalui pembelajaran mesin (machine learning) robot dapat melakukan beberapa interaksi bersifat sosial.
Para peneliti telah mengembangkan kerangka kontrol yang memungkinkan robot untuk memahami apa artinya membantu atau menghalangi satu sama lain. Mereka memasukkan penalaran sosial ke dalam tugas yang mereka selesaikan. Langkah ini membuat mesin belajar dan melakukan perilaku sosialnya sendiri.
Dalam simulasi, robot mengawasi rekannya, menebak tugas apa yang ingin diselesaikannya, dan kemudian membantu atau menghalangi robot lain ini berdasarkan tujuannya sendiri. Para peneliti juga menunjukkan bahwa model mereka menciptakan interaksi sosial yang realistis dan dapat diprediksi.
Ketika mereka menunjukkan video robot simulasi yang berinteraksi satu sama lain dengan manusia, pemirsa manusia sebagian besar setuju dengan model tentang jenis perilaku sosial apa yang terjadi. Dengan mengaktifkan robot untuk menunjukkan keterampilan sosial dapat mengarah pada interaksi manusia-robot yang lebih halus dan lebih positif.
Model baru ini juga memungkinkan para ilmuwan untuk mengukur interaksi sosial secara kuantitatif, yang dapat membantu psikolog mempelajari autisme atau menganalisis efek antidepresan. Misalnya, robot di fasilitas tempat tinggal yang dibantu dapat menggunakan kemampuan ini untuk membantu menciptakan lingkungan yang lebih peduli bagi orang lanjut usia.
"Robot akan segera hidup di dunia kita dan mereka benar-benar perlu belajar bagaimana berkomunikasi dengan kita dalam istilah manusia," ujar peneliti utama dan Kepala Grup InfoLab CSAIL) dan anggota Center for Brains, Minds, and Machines (CBMM), Boris Katz.
Ia mengatakan robot perlu memahami kapan saatnya membantu dan kapan saatnya untuk mencegah sesuatu terjadi. "Ini adalah pekerjaan yang sangat awal. Saya merasa ini adalah upaya pertama yang sangat serius untuk memahami apa artinya bagi manusia dan mesin untuk berinteraksi secara sosial," katanya pada laman institut tersebut.
Melalui Simulasi Sosial
Untuk mempelajari interaksi sosial, para peneliti menciptakan lingkungan simulasi sosial di mana robot mengejar tujuan fisik dan sosial saat mereka bergerak di sekitar kotak dua dimensi. Tujuan fisik berhubungan dengan lingkungan. Misalnya, tujuan fisik robot mungkin untuk menavigasi ke pohon pada titik tertentu.
Sementata tujuan sosial melibatkan menebak apa yang coba dilakukan robot lain dan kemudian bertindak berdasarkan perkiraan itu. Tindakan yang dimaksud contohnya membantu robot lain menyirami pohon.
Para peneliti menggunakan model mereka untuk menentukan apa tujuan fisik robot, apa tujuan sosialnya, dan seberapa besar penekanan yang harus diberikan pada satu di atas yang lain. Robot dihargai untuk tindakan yang diambil yang membuatnya lebih dekat untuk mencapai tujuannya.
Jika robot mencoba membantu temannya, ia menyesuaikan hadiah (reward) nya agar sesuai dengan robot lain. Jika ia mencoba untuk menghalangi, ia menyesuaikan ganjaran menjadi sebaliknya. Perencana, algoritma yang memutuskan tindakan mana yang harus diambil robot, menggunakan penghargaan yang terus diperbarui ini untuk memandu robot melakukan perpaduan tujuan fisik dan sosial.
"Kami telah membuka kerangka matematika baru untuk bagaimana Anda memodelkan interaksi sosial antara dua agen. Jika Anda adalah robot, dan Anda ingin pergi ke lokasi X, dan saya adalah robot lain dan saya melihat Anda mencoba pergi ke lokasi X, saya dapat bekerja sama dengan membantu Anda mencapai lokasi X lebih cepat," jelas rekan penulis utama asisten peneliti di CSAIL, Ravi Tejwani.
"Itu mungkin berarti memindahkan X lebih dekat ke Anda, menemukan X lain yang lebih baik, atau mengambil tindakan apa pun yang harus Anda ambil di X. Formulasi kami memungkinkan rencana untuk menemukan bagaimana kami menentukan 'apa' dalam arti interaksi sosial secara matematis," lanjut dia.
Memadukan tujuan fisik dan sosial robot penting untuk menciptakan interaksi yang realistis, karena manusia yang saling membantu memiliki batasan sejauh mana mereka akan melangkah. "Misalnya, orang yang rasional kemungkinan besar tidak akan menyerahkan dompet mereka kepada orang asing," kata penulis senior dan seorang ilmuwan penelitian di CSAIL dan peneliti pada (CBMM), Andrei Barbu.
Para peneliti menggunakan kerangka matematika ini untuk mendefinisikan tiga jenis robot. Robot level 0 hanya memiliki tujuan fisik dan tidak dapat bernalar secara sosial. Robot level 1 memiliki tujuan fisik dan sosial tetapi mengasumsikan semua robot lain hanya memiliki tujuan fisik. Hay
Baca Juga :
Penemuan Sinar-X Merevolusi Dunia Kedokteran
Redaktur : Ilham Sudrajat
Penulis : Haryo Brono

Komentar
()Muat lainnya